This is an old revision of the document!
Kopter-Projekte im uCCC
Diese Seite soll zum Sammeln von Links und Informationen ueber die diversen Kopter-Bauvorhaben (quadkopter, mikrokopter, arm-o-kopter, uavp und wie auch immer) die derzeit hier passieren dienen… Zur Begriffsklaerung:
- Quadkopter: ein Kopter mit 4 Propellern, egal welche Steuerelektronik (analog: Oktokopter mit 8 Props)
- Mikrokopter: Quad/Oktokopter auf Basis der Flightcontrol von Ingo & Holger: www.mikrokopter.de
- UAVP-NG - neue Open-Source Koptervariante, noch Beta aber vielversprechend
- Arm-O-Kopter: Kopter mit einer wohl closed-source ARM-Steuerelektronik
- Gegenueberstellung der verschiedenen Projekte: http://multicopter.org/wiki/Multicopter_Table
- Brandneu: http://openmulticopter.org
- neues Projekt auf ATXmega Prozessor Basis http://www.xmegakopter.de
- Drohnen Versicherung auf https://versichertedrohne.de/index.htm
Aktuell sind alle in Arbeit befindlichen Kopter bei uns Mikrokopter…
Da derzeit einige Kopter in Arbeit sind, besteht gute Chance fuer Sammelbestellungen bei einzelnen Komponenten. Zwar ist der Versand im Mikrokopter-Shop fuer so teurer Bestellungen eh gratis, aber es ist dennoch nett eine Bestellung anzukuendigen weil sicher immer irgendwem noch irgendwas kleineres fehlt…
Basisinfos
Generelles
- Wer noch gar nichts hat, benoetigt auch noch ein LiPo-Ladegeraet, dieses sollte einen Balancer-Anschluss besitzen um mehrzellige Akkus zu laden, und einen Sender mit passendem Empfaenger. Klassisch steckt man in Sender und Empfaenger ein passendes Quarzpaar um den Kanal zu waehlen, inzwischen sind aber auch Geraete mit Sythesizer (Frequenz kann durch die Elektronik bestimmt werden) leistbar geworden. Details zu diesen Punkten weiter unten
- Bevor man an's Bestellen von Motoren und Props geht, sollte man sich ueber die Groesse des geplanten Kopters Gedanken machen. Hilfreich dazu sind die Tabellen am Ende der Einsteigertipps von mikrokopter.de
- Weitere Infos zum Thema Drohnen Versicherungspflicht auf http://versicherungdrohne.de/
Versicherung
(sich hier bitte den Wikipediahinweis zu Rechtsthemen vorstellen… )
Seit 2005 ist fuer alles motorbetriebene Fliegende offenbar eine Haftpflichtversicherung vorgeschrieben, andernfalls ist der Betrieb zumindestens auf oeffentlichem Grund eine Ordnungswidrigkeit (nehme aber an die wird nur verfolgt wenn was passiert, oder jemand ECHT Langeweile hat), ganz davon abgesehen, dass man fuer Schaeden mit dem kompletten Privatvermoegen haftet (ein Autounfall kann schnell teuer werden… Also neben Strassen ohne Haftpflicht fliegen sollte eher die Ausnahme bleiben). In normalen Privathafpflichtversicherungen ist Modellflug ebenfalls oft ausgeschlossen, oder auf dafuer vorgesehene Flugplaetze beschraenkt.
Die umfassenste “einzelne” Versicherung die ich bisher gefunden habe ist die der Deutschen Modellsport Organisation , fuer 40 EUR/Jahr deckt sie weltweit (ausser USA) bis zu 1.5 MIO EUR Schaden ab (auf 3 Mio erweiterbar), und erlaubt dabei das Fliegen auch ausserhalb extra freigegebener Gelaende. Man muss sich lediglich an die gesetzlichen Vorgaben halten, was wohl grob “mindestens 1.5 km Abstand zum naechsten Flughafen, Maximalgewicht 5kg, kein Verbrennungsmotor” bedeutet.
Mikrokopter
- Einen guten Ueberblick ueber die benoetigten Teile bietet die uKopter-Projektseite
- Die langweilige Variante ist es, einfach ein Komplettset im mikrokopter.de Shop zu bestellen. Gibt aber auch fuer Selberzusammensteller nen guten Ueberblick ueber die benoetigten Komponenten.
- Statt den relativ teuren brctls dort aus dem Shop, experimentieren derzeit einige damit billigregler aus China (gut 10 EUR/Stueck) flightcontrol-tauglich umzubauen. Mehr dazu unten bei Komponenten…
- Entscheiden muss man sich ausserdem zwischen Flightcontrol 1.3 und 2.0/ME. Die 1.3 ist der Klassiker und auch als Bausatz verfuegbar (dann nochmal deutlich guenstiger, aber eher was fuer Loetprofis), die 2.0 gibt es nur quasi-fertig (paar Teile muss man immer bestuecken). Neben einem gut 100 EUR hoeheren Preis bietet sie modernere Gyros (kein Abgleich bei Temperaturwechsel, z.B. von innen nach draussen, mehr noetig) und hat ein paar Servo-Anschluesse mehr. Die 1.3 ist aber weiterhin Supported und wird nicht durch die 2.0 ersetzt, diese ist lediglich eine etwas luxurioesere Variante.
Wer baut was?
| Kopter | Was | Projektstand | Details |
|---|---|---|---|
| schneider | mikrokopter | fliegt | FC 1.3gn, 10er Props, EK5-002 Motoren, China TowerPro BrCtl 25A Version 1 |
| ray1 | ohne eigene ctrl | zerstoert | keine eigene FC, aktuell keine BRCTLs, 12er Props, 54cm Spannweite, EK5-003 Motoren - braucht neues Alu |
| ray2 | mikrokopter | fliegt | FC 1.3rt, 2 gyros ersetzt, ca. 40cm Spannweite, 8er Props, EK5-002 Motoren, China Dragonsky 20A BrCtl, MX16s 35mhz Sender |
| iggy | mikrokopter | fliegt | FC 1.3gn, 12er Props, EK5-003 Motoren |
| bernd | mikrokopter | Partiell gebaut | FC MErt, 12er Props+Alumitnehmer, EK5-003 Motoren, BRTCLrt |
| kiu | mikrokopter | fliegt | FC1.3gn, 1045, EK5-002, MK BrCtl, MX-16s |
Baublogs
Ray
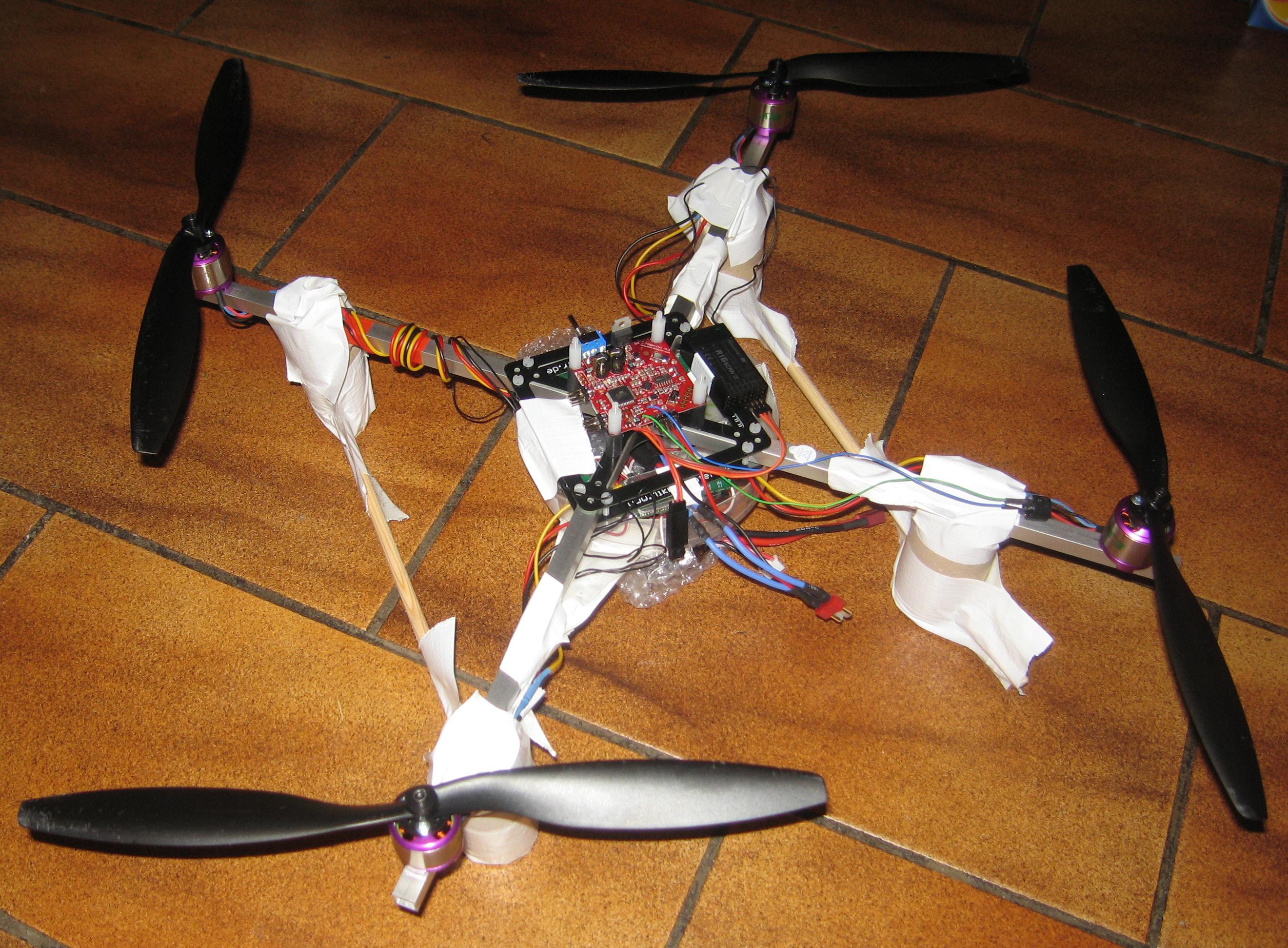
Status: Kopter fliegt (seit 5.7.09), schon diverse Crashes ueberlebt… Den letzten aber nicht. Elektronik jetzt auf Gestell von ray2 uebernommen, ray1 wird neu aufgebaut.
Lessions learned
Aufbau: die Motoren wurden bei mir immer wieder locker. Entweder mehr Drehmoment, oder vielleicht mal ne Zahnscheibe oder so unter die Schraubenkoepfe. Plastikschrauben schaden der Steiffigkeit des Gestells, ebenso das “neben” dem Holm schrauben statt durch. Meine beiden flexiblen Arme werde ich komplett auf durchgesteckte und fest verschraubte Metallschrauben aendern, sonst schwingt er beim Lastenheben doch sehr.
Fliegen: gleich mehrere Akkus haben! Wenn das Teil mal tut will man auch fliegen. Danke an Schneider fuer die “Starthilfe” mit seinen ") Und: 0 Gas der Graupner ist “50%” fuer den Kopter. Also auf jeden Fall beim Anschalten drauf achten dass der Stick schon umgebaut ist dass er unten bleibt, sonst verwuestet er beim “harmlosen” Anschalttest erstmal das Wohnzimmer.
Und: 0 Gas der Graupner ist “50%” fuer den Kopter. Also auf jeden Fall beim Anschalten drauf achten dass der Stick schon umgebaut ist dass er unten bleibt, sonst verwuestet er beim “harmlosen” Anschalttest erstmal das Wohnzimmer.
Fernbedienung: Die Graupner MX16s ist Standardmaessig in Mode 1, das tut auch wie erwartet. Besser ist es aber das Modell auf Mode 4 umzustellen, dann sind erstmal Gas und Steuerung vertauscht, das kann man ueber Kanalzuordnung (12→34 und umgekehrt) wieder beheben. Vorteil dann: man kann auf die Steuerung Funktionen anwenden (z.B positiv exp um die Mitte des Sticks “aufzuweiten”) und man kann den Flug/Stop timer an den “Startgas” Hebel koppeln, so dass der Stop-Counter automatisch die Flugzeit mitzaehlt - sehr schoen zum Akkulaufzeitueberwachen!
Generelles
Gestell: aktuell habe ich kein richtiges Landegestell, der Kopter ist ein wenig improvisiert mit Gaffa zusammengebaut. Kabel zu den Motoren sind noch aussen verlegt. Lande“gestell” sind 4 Klorollen an den Armen - hat sich aber ganz gut bewaehrt, kippt nicht so leicht um wie Schneiders - Anfaengertauglich.
Aufbau: ich habe die 4 BRCTLs unten an der Flightcontrol, so konnte ich die original vorhanden Anschlussdraehte unten zusammenfuehren um sie an den Akku anzuschliessen. Ich fuehre den Strom dafuer nicht ueber die Flightcontrol, erstens war's einfacher, zweitens teile ich schneiders Bedenken ob der Schalter so viel Power auf Dauer mitmacht. Blitzt so halt etwas beim Akkuanstecken. Evtl. stoeren die “grossen Stroeme” so auch den Kompass weniger. Lautsprecher ist wegen Kompasstoerung an den hinteren Ausleger verbannt.
Stecker: die Motoren habe ich mit den beiliegenden Goldsteckern angeschlossen, fuer den Akku nehme ich erstmal Dean Ultra. Weil der halt dran war
{kind=link}
Crashtistik
Statistik ueber Crash-Schaeden, so als Ueberblick was die empfindlichen Teile sind…
| Kopter | Wann | Was | Wie |
|---|---|---|---|
| ray1 | 10.7. | Propmitnehmer 8/12 gebrochen | Kopfueber vom Himmel rasen, auf Beton, aus ca. 3m Hoehe |
| ray1 | 11.7. | 2 Props (einer angeknackst, einer komplett durch, jeweils am Ansatz), 1 Propmitnehmer 8/12 | Kopfueber vom Himmel fallen, auf Beton, aus ca. 3m Hoehe |
| ray1 | 12.7. | 1 Prop verbogen | Kopfueber vom Himmel fallen, auf Gras, aus ca. 4m Hoehe Video eines aehnlichen Crashs ohne Schaden |
| ray1 | 16.7. | 1 Prop und 8/12 Mitnehmer rundgedreht | bischen schraeg in den Boden landen |
| ray1 | 17.7. | Erste echte zerstoerung - fliegt nimma, ausserdem 1 Prop hin und 1 Motor-Kugellager rausgerissen | ohne Gummipuffer an der FC aus 2m Hoehe auf herumstehendes Leergut gefallen: 2 Gyros mussten getauscht werden |
| ray1 | 26.7. | Alustange am Motor gebrochen. Rahmen war insgesamt schon eher krumm… Ausser Dienst gestellt. | Sanfte Landung im Baum, dann nach aufwendiger Bergung harter Fall aus Baum auf Weg. Gyros haben ueberlebt, evtl. dank Daempfern? Er flog noch mit krummem Motor, bekam dann aber den Gnadenknacks |
| kiu | 29.7. | Abstandhalter und Schraube gebrochen, Prop gerissen, Lipo verloren | wahllos gegen Penny geflogen |
| kiu | 29.7. | Prop gerissen, Summer zerstoert | Tiefgaragengitterbox kennengelernt |
Komponenten
Sender
Apic hat das Set vom e-heli-shop empfohlen. Fuer 200 EUR bekommt man einen Synthesizer-Sender mit passendem Empfaenger. Achtung: Ladekabel liegt nicht bei!
Zum Frequenzband: es gibt aktuell 35 Mhz, 40/41MHz und 2.4Ghz zur Auswahl. 35Mhz ist exklusiv fuer Flugmodelle reserviert, wird auf Koptertreffen aber daher natuerlich auch viel verwendet - genug Kanaele sollte es zwar geben, aber fuer jemanden ohne Synthesizer empfehlen sich da doch mehrere Quarzpaare und man muss halt sehr aufpassen sich nicht zu stoeren. Im 40/41MHz Band sind nur wenige Kanaele fuer Flugmodelle freigegeben, wie schlimm das ausserhalb von Modellflugclubs wirklich ist weiss grad keiner bei uns. 2.4GHz ist die modernste Variante, aber im Club gibt es allgemein Vorbehalte dieses doch schon sehr belastete Band (gerade auf Hackerevents) dafuer zu verwenden, auch wenn das eingesetzte CDMA Verfahren wohl recht stoerungsresistent sein duerfte. Die meisten im Club haben aktuell 35Mhz.
Ray findet inzwischen doch Gefallen an 2.4GHz, Kanalkollission ist da wohl quasi ausgeschlossen, hoechstens die Reichweite sinkt halt je mehr in der Umgebung in dem Band unterwegs ist oder so, ist regulaer aber wohl sogar hoeher (v.a. mit US-Sendern die weit ueber 100mW gehen koennen . Da gibt's im mikrokopter-shop ein “Spektrum” Set mit nutzbarem Empfaenger fuer 270, “, guenstigere Sets gibt es noch von Robbe, das ist dann aber auch nen etwas simpleres Geraet. Oder auch nur wenig teurer mit wohl vergleichbarem Bedienkomfort. Die Billigere laeuft wohl mit normalen Batterien oder AAA-Akkus oder so, hab ich aber ned genauer angesehen.
Handbuecher verschiedener Robbe Futaba 2.4GHz im Download Handbuch fuer die Spektrum DX7
Und zur Verwirrung: “Spektrum” verkauft wohl JR Sender (JR stellt auch die Sender fuer Graupner her) mit ihren 2,4GHz Modulen, daher ist die Spektrum sehr aehnlich zu Graupner - die DX7 aus dem Shop entspricht wohl grob einer MX 14. Hat aber eine andere Software. unterscheidet sich also in der Bedienung! Graupner selber setzt bei 2,4ghz wohl auf andere Module (IFS), die ein Stueck teurer sind (336 fuer ein Set im e-heli-shop), die Sender sind dafuer dann identisch zu den normalen.
Nach noch mehr rumsurfen: 2.4GHz ist schwierig, weil die Receiver i.d.R. kein Summensignal ausgeben (Ausnahme der R607 und evtl. andere von Robbe Futaba). Es gibt zwei Loesungen:
- Das Adaptermodul macht aus den Einzelsignalen eines Receivers ein Summensignal, ist halt nochmal ne extra Platine
- Beim Spektrum kann man den Sateliten-Receiver (ist dabei) nehmen, der gibt das Signal digital aus, das kann man dann ueber UART2 des Atmels in die Flightctrl speisen. Doof: dann geht der Kompass nimma dran, braucht dann Navicontrol. Forumsthread zum Thema
Ich glaub ich lass das doch erstmal. Gna. Aber toll ist die 2,4GHz Technik wohl schon, hab jetzt keinen gelesen der sie hat und nicht zufrieden ist. Bedenken aeussern immer nur die anderen
Empfaenger
Braucht man halt im zum Sender passenden Frequenzband. Entweder mit Quarz, oder eben auch Sythesizer, in letzterem Fall kann man den Empfaenger meist durch Knopfdruck auf den staerksten Sender anlernen - also Fernbedienung auf gewuenschten Kanal stellen (sendet dann eh dauernd), danebenlegen, Knopf druecken.
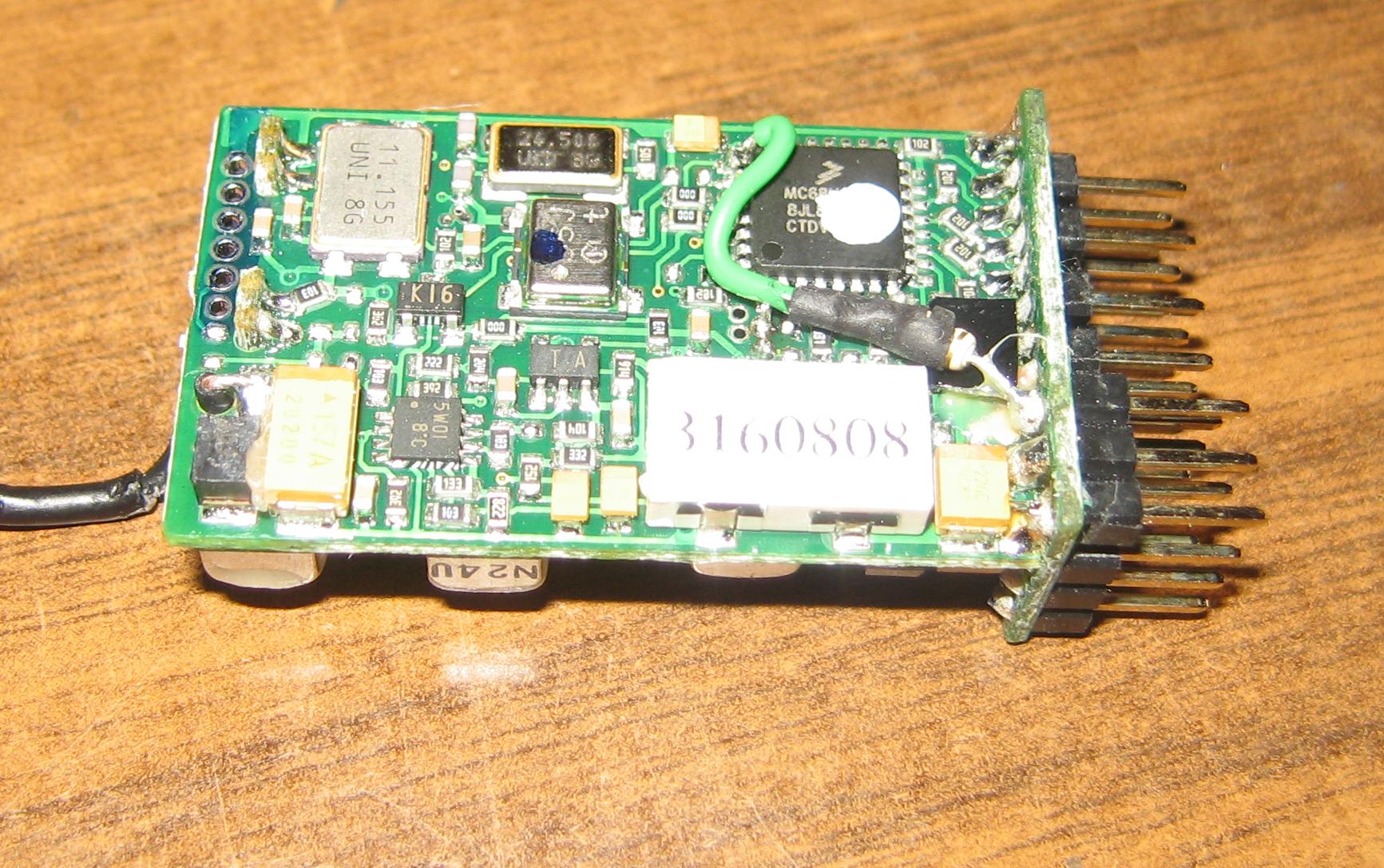
Wichtig ist, dass der Empfaenger das “Sumemnsignal” ausgibt, dies uebertraegt alle/die ersten n Kanaele auf einem einzigen Pin und ist leider meistens nicht herausgefuehrt. Es gibt im Mikrokopter-Wiki jede Menge Umbauanleitungen, hier z.B. die fuer den in obigem Set enthaltenen R16SCAN . Im Mikrokoptershop gibt es einen der das direkt ausgibt, leider nur fuer Quarzbetrieb.
Rays umgebauter R16Scan: http://photo.ray.net/~ray/receiver.jpg
{kind=link}
Akkuladegeraet
Verwendbare gibt es so ab 60 EUR, die eins bessere Generation (mit Display zur Bedienung, mehr Ladestrom, mehr Zellen) so ab gut 100/120. Ray hat einfach das Ultramat 16 aus dem Mikrokoptershop (125 EUR) genommen, Schneider hat eines das wohl technisch zum “Hyperion EOS 0606i” aus Stephans LiPo Shop identisch ist, dort gibt es auch noch eine groessere Auswahl. Wichtig ist eben ein Balancer-Ausgang, wobei man darauf achten sollte einen zum eigenen Akku passenden Balancer-Adapter dabei zu haben, da gibt es 2-3 Standards die sich leicht im Stecker unterscheiden (Man will wohl JST Stecker nicht XPH, Adapter gibt es bei reichelt).
Nachteil des Ultramat 16: ein permanent waehrend des Ladens laufender Luefter, und zwar nicht der leiseste. Ray ueberlegt ernsthaft das casezumodden…
iggy hat ein Pichler P6 Deluxe und damit seine Sammlung kleiner Alukoffer erweitert . Tolles Gerät, viele (über dean-Stecker angeschlossene) Adapter. Lüfter läuft dauernd beim Laden, ist aber recht leise. Hat auch USB um Ladekurven anzuzeigen, aber noch nicht mit rumgespielt
LiPos
Ueblich fuer einen Kopter sind wohl so 2200mAh, gibt es um die 40 EUR. Aus China noch billiger, aber die Qualitaet (lebensdauer des Akkus, Lebensdauer desjenigen der daneben steht wenn er abbrennt…) schwankt leider. Kann dazu jemand mit mehr Ahnung noch mehr schreiben?
Tests ob groessere mehr Flugzeit bringen, v.a. bei eh schweren Grosskoptern, stehen noch aus.
Flight Control
Es gibt beim Mikrokoptershop die fertig aufgebaute FC auf roter Platine, unbestückt in Grün und die mit den schwierigsten Bauteilen (DAC und ACC-Sensor) vorbestückte Cheaterplatine auch in Grün. Schneider hat DAC und ACC erfolgreich mit Heissluft installiert, iggy und kiu haben gecheated.
Um die FCs leicht austauschbar zu haben und den Verkabelungsaufwand zu reduzieren wird der Münchner Kopter-FlightControl-Stecker-Standard empfohlen: Folgende Belegung auf 10-poligem Micromatch (Messer-Seite mit offenen Kontakten auf der FlightControl-Seite, Belegung gesehen auf Messerseite (nicht Lötseite)
- <- GND - <- GND - <- V+ - <- V+ - <- frei - <- frei - <- I2C Data - <- I2C Clock - <- Buzzer + - <- Buzzer - * <- Plastik-Pin
Brushless Controller
Hier gibt es aktuell zwei Varianten:
BRCTL von Holger&Ingo
Die Standardloesung fuer einen Mikrokopter. Kosten fertig aufgebaut 40 EUR, kauft man ihn in Einzelteilen (Platine von mikrokopter.de, Teile von reichelt.de) sind es so um die 22EUR.
Kiu befasst sich aktuell mit der Selsbtbauvariante, also bis er mehr dazu hier reingeschrieben hat, einfach ihn fragen…
Chinaumbau
Ein weites Feld… Es gibt etliche Brushless-Regler aus China um die 10 EUR, die alle mehr oder weniger identisch sind. Problem dabei ist: fuer die Nutzung am Flightcontrol benoetigen sie einen I2C Eingang zur Steuerung, dieser muss erst auf der CPU (Atmega8) freigelegt/angeschlossen werden, und dann eine passende Firmware geflasht werden die das supported, wozu man i.d.R. noch nen ISP-Anschluss direkt an die CPU loeten muss.
Schneider hat den Umbau bereits erfolgreich durchgefuehrt mit seinen TowerPro 25A Version 1 Reglern, fuer den es hier eine Anleitung gibt (andere Platinenrevision)
Ray hat sich die Dragonsky 30A Regler aus dem RC-Brushless-Shop bestellt und erfolgreich umgebaut. Der Shop liefert per DHL aus Luxenburg, ne knappe Woche muss man von Bestellung zu Lieferung rechnen bei Vorauskasse.
Unuebersichtlich viele Infos zum Thema Reglerumbau finden sich im Mikrokopter Forum in einem fast 40-Seiten langen Thread.
Die “Standardseite” zum Umbau ist http://home.versanet.de/~b-konze/ - dort das I2C_Umbau.pdf erklaert das wesentliche
Zur Firmware: die Firmware legt fest welche ID der Controller auf dem I2C hat, das muss man i.d.R. nur einmal. Allerdings gibt es auch andere Parameter, v.a. wohl einen PWM Startup Wert, den man evtl. noch tunen moechte - schneider wird das wohl mal rausfinden. Je nachdem was da rauskommt koennte das ein Grund sein das ISP Interface so zu verbauen, dass es nutzbar bleibt, ist halt mehr Aufwand. Mit den aktuellen Werten ist das Motor-Startverhalten zumindestens bei schneioder und ray etwas schlecht, aber in der Praxis doch kein ernstes Problem.
International kapselweit genormte Belegung des Flach-ISP
Von einer Seite aus: MOSI, MISO, SCK, RESET, +5V, GND (grob Reihenfolge auf dem Chip, auch wenn ned alles an den Chip muss)
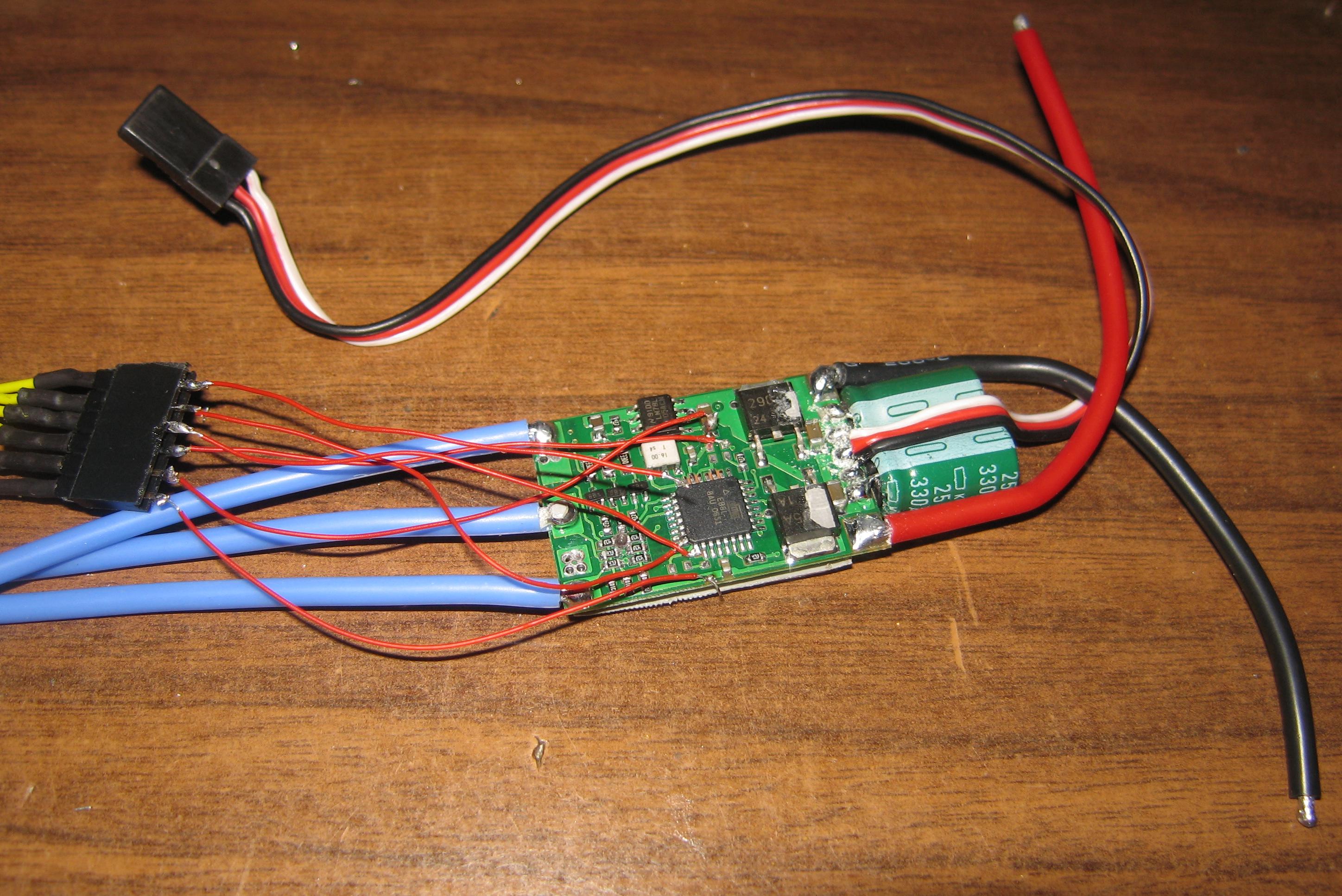
Bild Dragonsky 30A mit fast angeschlossenem ISP (MOSI fehlt noch) http://photo.ray.net/~ray/dragonsky.jpg
Man beachte den Anschlusspunkt fuer Reset, +5V kann man auch am Pad haben aber Kondensator war grad da. GND geht quasi ueberall nach Lust und Laune. MOSI,MISO, SCK muessen direkt an den Chip.
{kind=link}
Rays Notizen zum Dragonsky 30A
Leider keine Loetpads fuer ISP, GND,+5 und Reset findet man aber auf der Platine gut zugaenglich, aber MISO/MOSI/SCK muessen direkt an den Chip. Gefummel, aber meinen 5. hatte ich in 15 Min fertig geflasht. Ich habe mich entschieden das ISP nicht dran zu lassen, so musste ich nur einen “Adapter” bauen und auch nicht so drauf achten dass die Kontakte fuer die Ewigkeit sind.
Dann muss eine Durchkontaktierung getrennt werden, ich habe zwischen den Widerstaenden gebohrt und diese dann per Luftloetbruecke neu verbunden, analog Umbau-PDF, denke aber inzwischen einen besseren Bohrpunkt gefunden zu haben: unterhalb des Atmel sieht man die Leiterbahnen im Zwischenlayer, dort kann man einfach nur die falsche Verbindung anbohren, sollte besser gehen. Das I2C fuehre ich ueber das Servokabel raus, weiss kann man durch entfernen eines SMD Widerstands frei bekommen und hat dann gleich nen Loetpad, fuer rot muss man ne dickere Leiterbahn mit dem Cuttermesser trennen. Achtung: ich hab in einem Controller das Kupfer dabei so “verschmiert”, dass es nen Kurzschluss mit nem Nachbaranschluss gab, also nicht nur nachmessen ob erfolgreich getrennt wurde, sondern auch obs neue Verbindungen gibt und ggf. nachcutten. Belegt habe ich nach Umbau-PDF Standard, weiss data, rot clock.
Nachdem ich erst etwas skeptisch war bin ich inzwischen doch wieder ganz zufrieden. Meine wirklich schlechten Loetpunkte am Chip (ich denke mit Flussmittel, einer besser verzinnten Loetspitze (wo ist mein Pflegezeugs hin?!?) und evtl. flexiblerem Draht ginge das deutlich schoener und einfacher!) haben doch alle direkt funktioniert, und jetzt auch mehrere Crashes aus teilweise mittlerer Hoehe (Rekord wohl so 3m) gut ueberlebt. Ich erwarte nicht dass die im Flug ausfallen. Nachtrag: allerdings gibt es immernoch Regelungsprobleme, die bei mir wohl schon zu drei Crashes durch Stehenbleiben eines Motors gefuehrt haben. Evtl. hilft Mingas hochdrehen, aber u.U. muss man auch wirklich mal an dem PWM Wert in der Firmware drehen…
Ein grosser Unterschied zum H&i Regler ist halt, dass die Chinesen 18 Muellmosfets verwenden statt 6 gescheiten. Ob das gut oder schlecht ist weiss ich nicht, aber ich hab mal die Hoffnung, dass es thermisch eingentlich unempfindlicher ist, auch wenn die nicht alle sauber den Kuehlkoerper beruehren.